Back in 2016, I built a Unity simulation of a beach-cleaning robot as part of a group project. We were designing a real robot, and the simulation helped us test ideas before building the hardware.
The Unity Environment

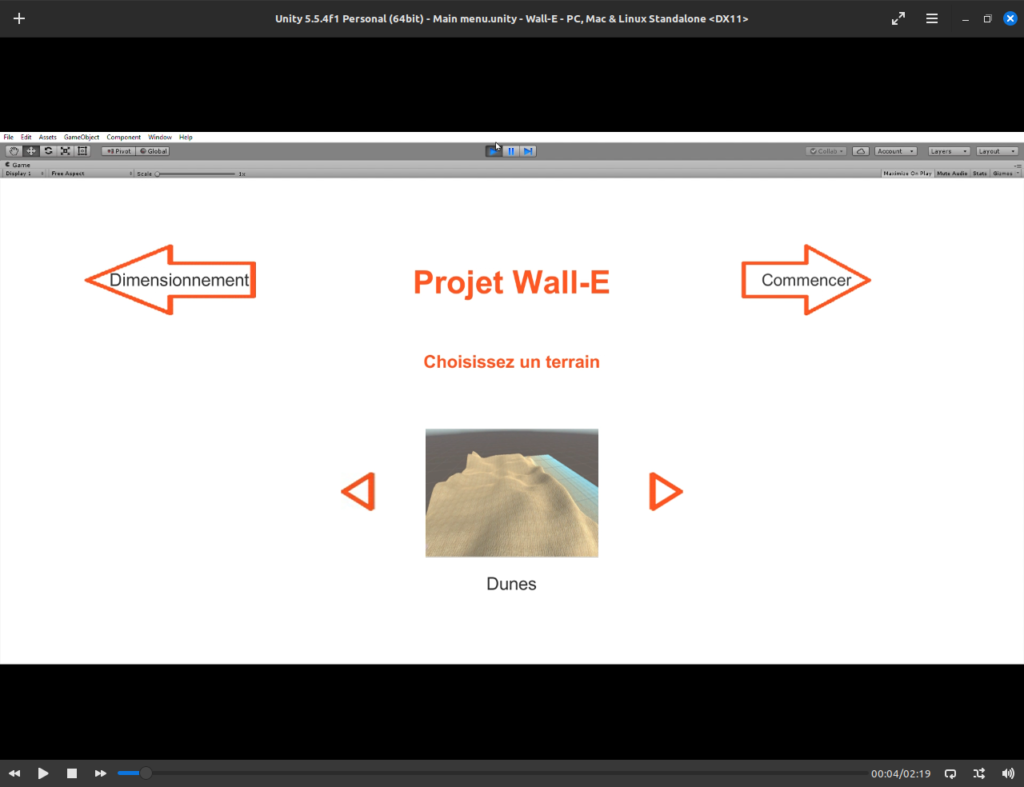
I created a beachscape in Unity with sandy shores, rolling waves, and a bright sky. The environment served as a testing ground for the robot’s behavior.
Robot AI
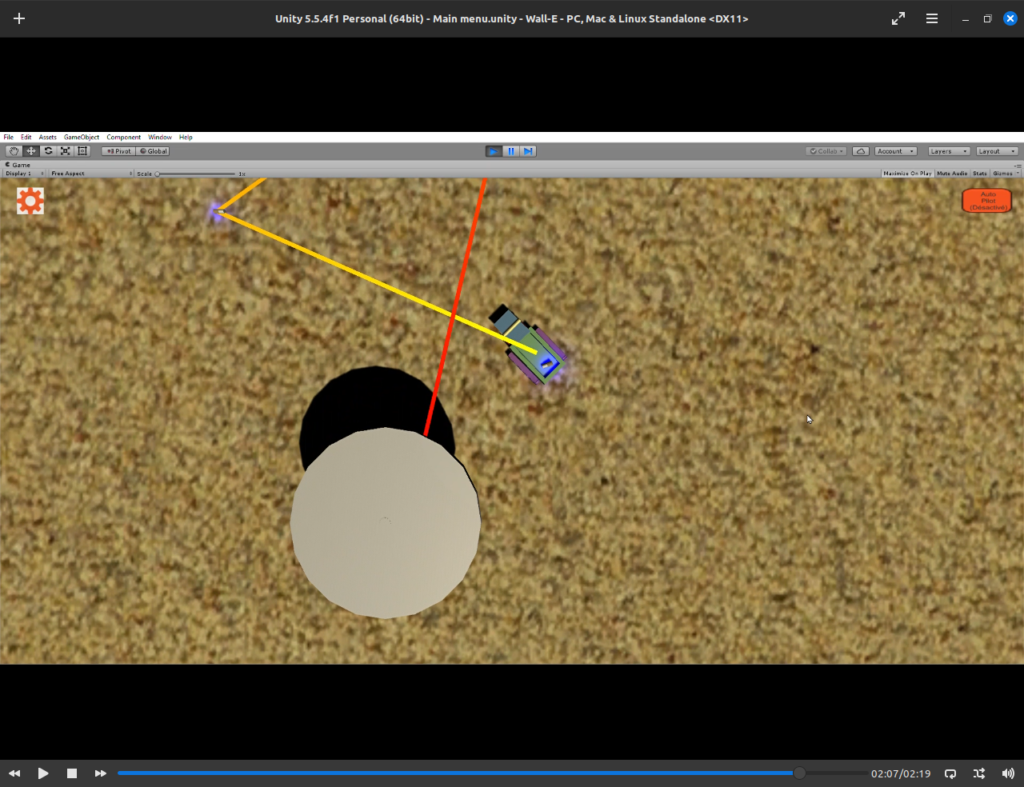
The core of the project was the robot’s AI. Using Unity’s physics engine, I programmed it to navigate the beach, identify and collect litter, then deposit it in a designated area. The algorithm was tuned to optimize cleaning efficiency.
Battery Simulation
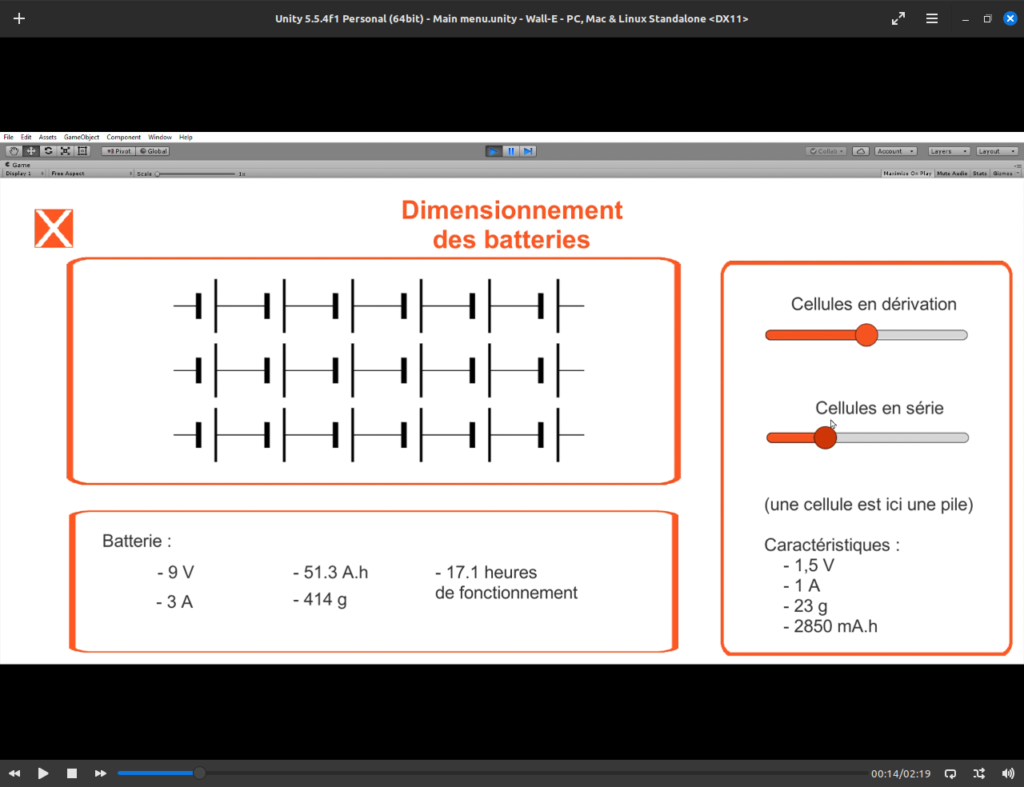
While I was developing the simulation, we were also building the real robot as a team. A major concern was battery life: how long could the robot clean before running out? I added an option to select battery characteristics using standard cells, so we could estimate operational limits before building anything.
Challenges
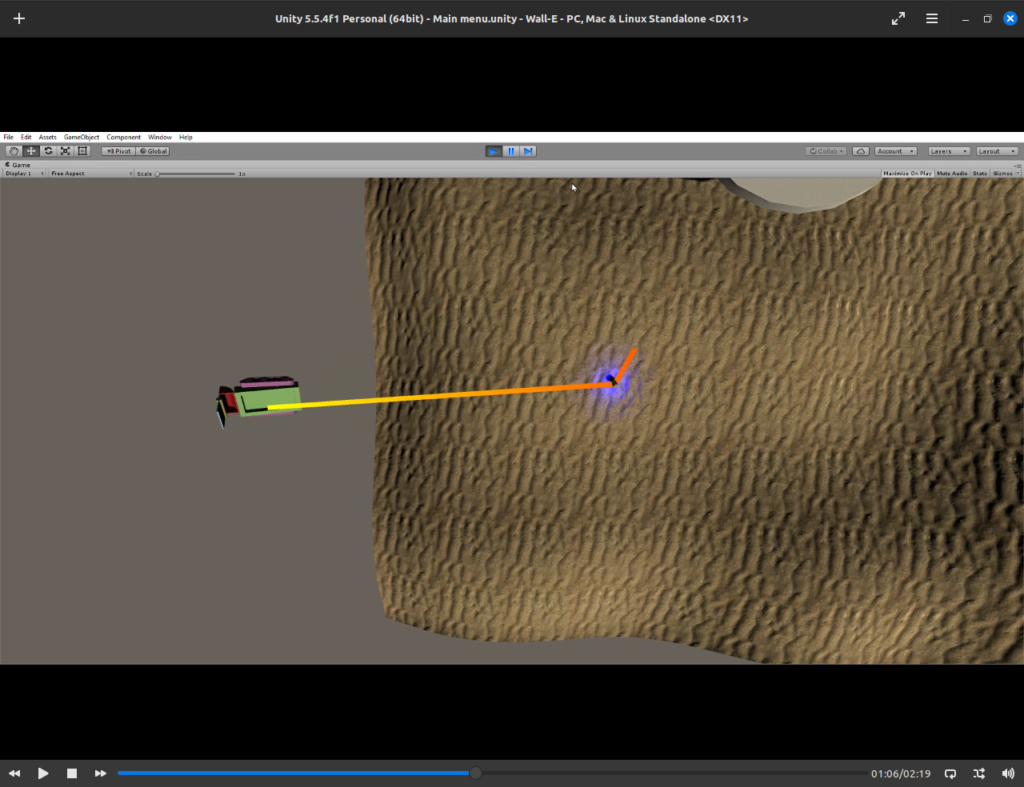
Debugging the robot’s pathfinding to avoid obstacles and interact with the environment smoothly was the hardest part. I also got useful feedback from teammates and environmental experts, which helped make the robot’s behavior more realistic.
The Real Robot
Our prototype, with a computer vision system to detect targets.
Conclusion
This was one of my earliest Unity projects, and a good example of using a simulation to support a real hardware project. It taught me the basics of Unity’s physics engine and AI scripting.